Intake Design - January 20, 2021
Table of contents
Front Intakes
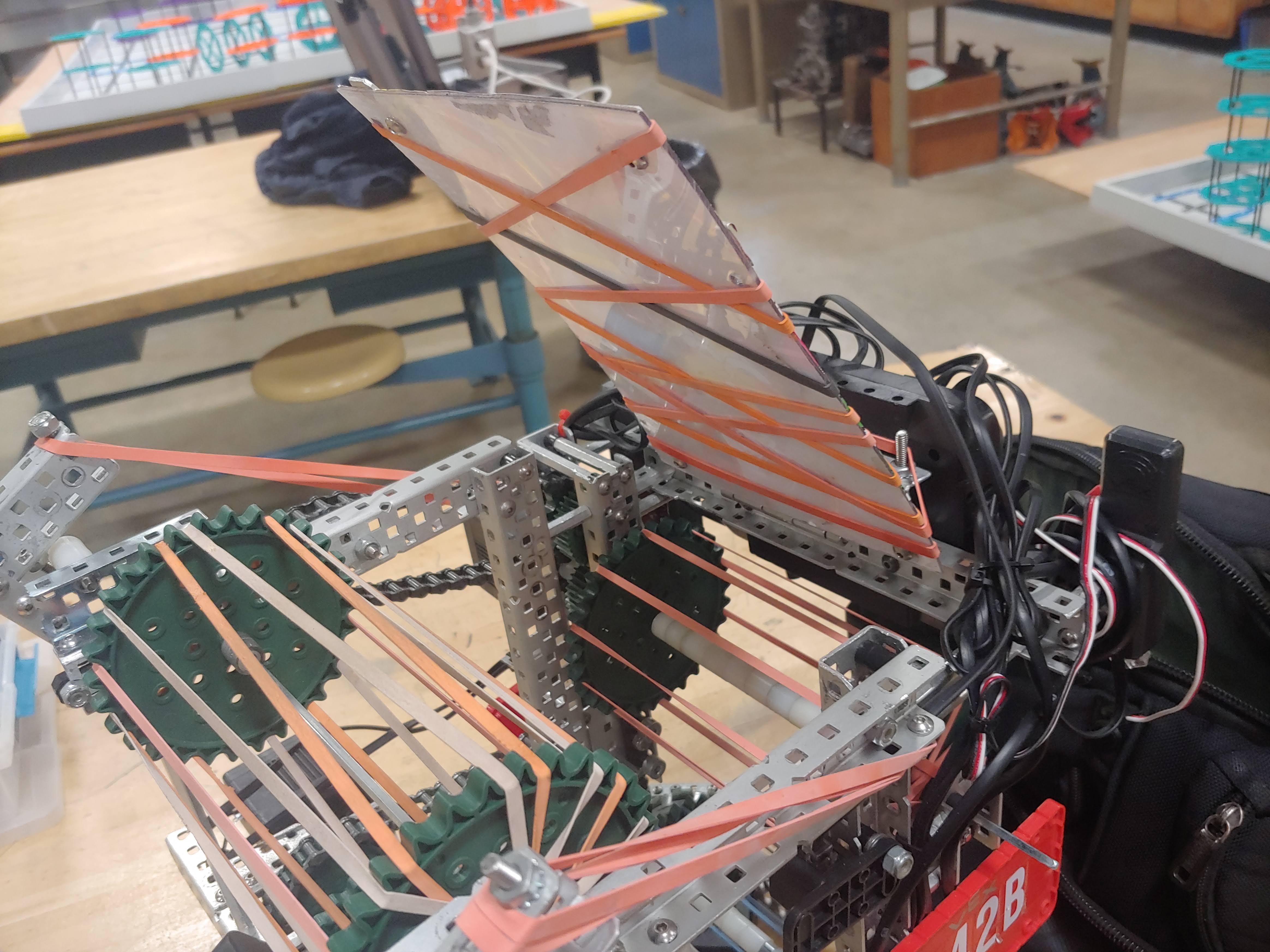
The robot was built so that the intakes could fold out to extend the reach of the robot into the goals. This was done by using nilocks and strand-offs.
Elastics are used to pull the intakes to the front and into position. The intakes rotate in until they hit the stopper. The stopper is made to be easily changed for the right amount of compression on the ball. The intakes run at 200 rpm.
It uses a mixture of chain and treads with flaps on sprockets to intake the balls.
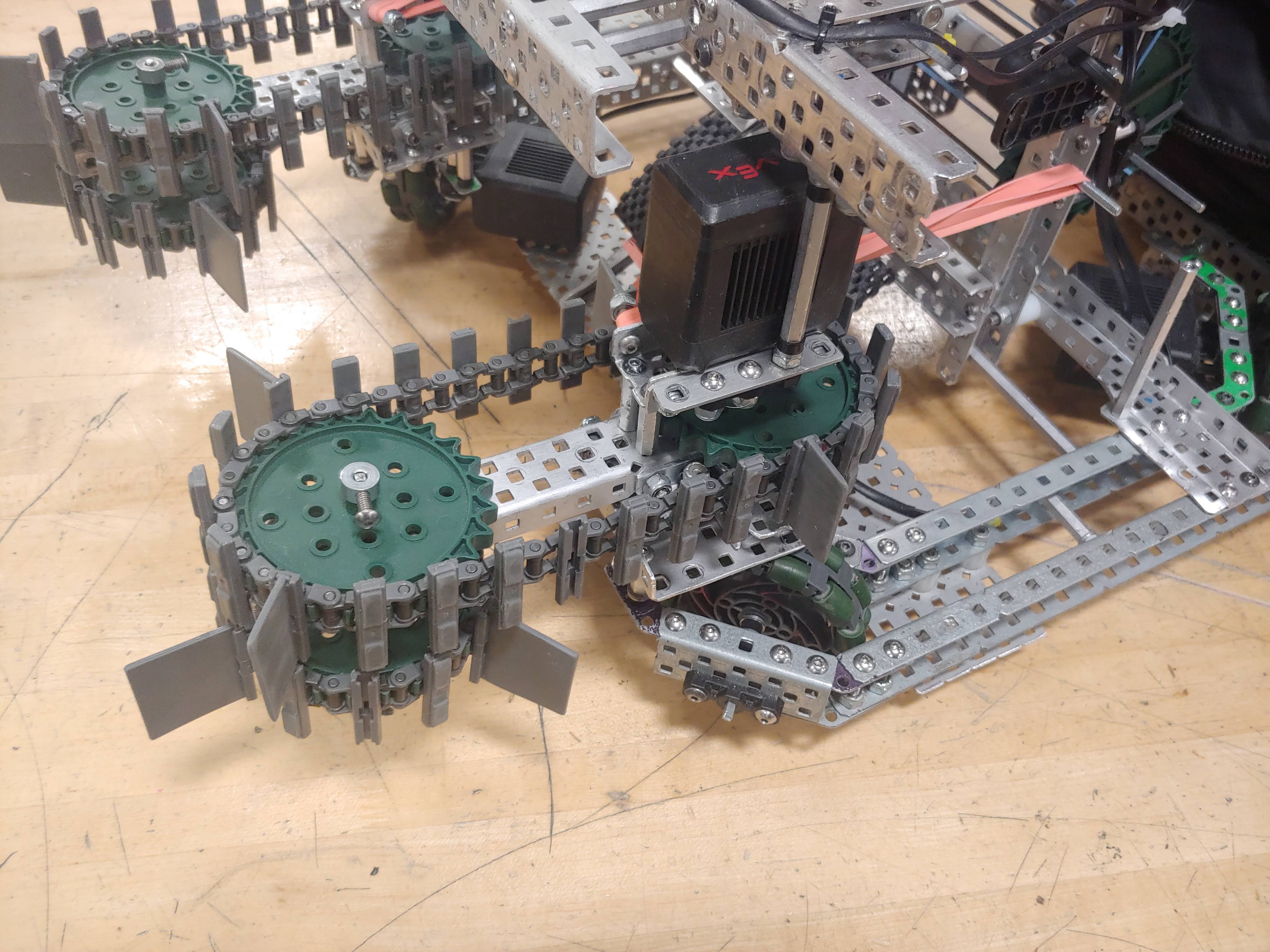
The first version of it didn’t have the lower sprocket but we added it because the roller wasn’t low enough to intake balls properly. You can see the intake doesn’t have the lower roller.
Back Rollers
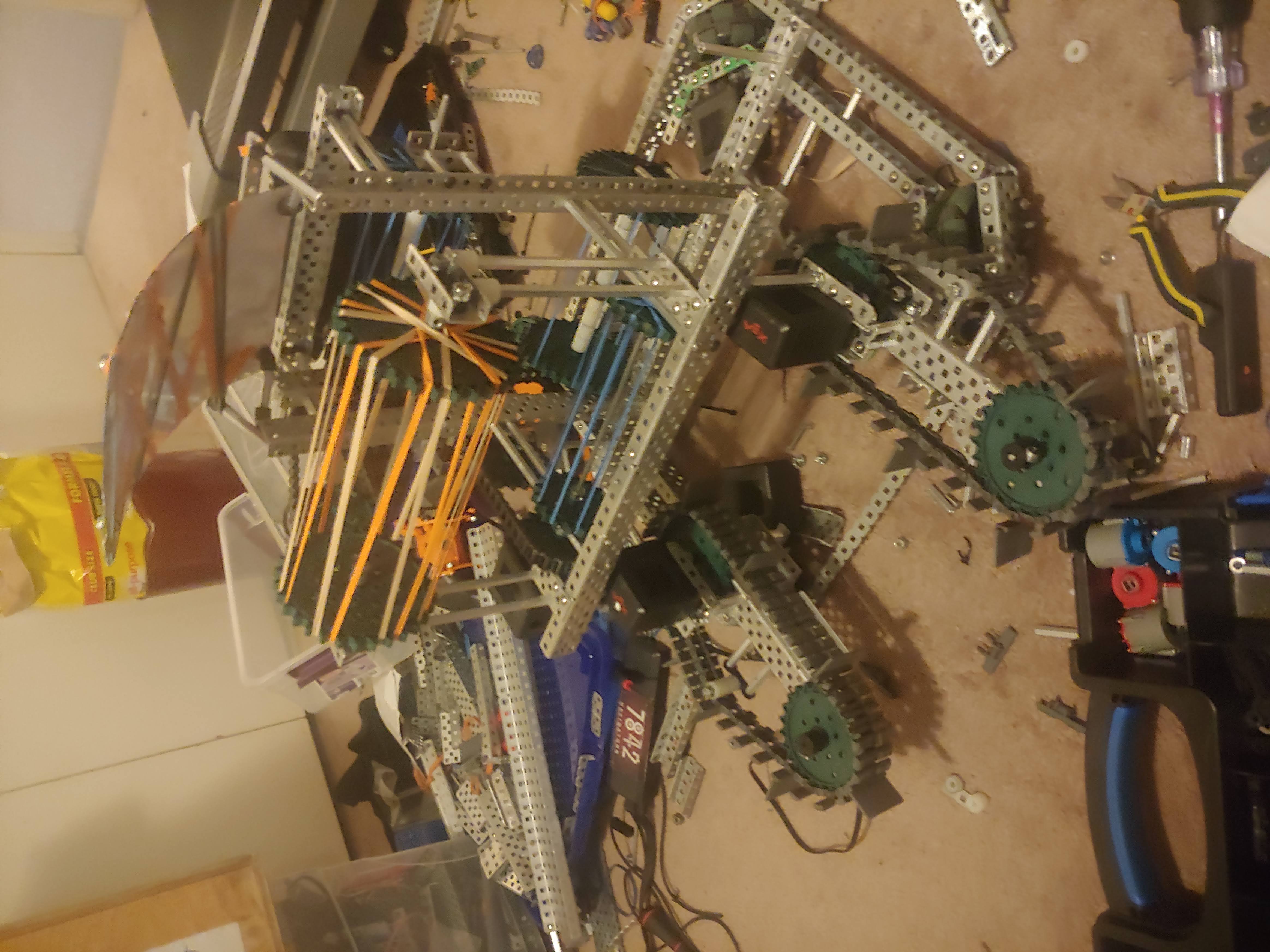
The robot has rollers at the back that are spaced apart so that we can get rid of the balls out the back:
The robot uses 2 motors for the rollers that move up and shoot the balls. Since there are 4 rollers each motor controls 2 rollers.
You can see the 4 rollers in his image:
However, since our robot gets rid of the wrong-colored balls out the back which means they need to be able to spin opposite directions – either spit out the ball or send it up to score with. Therefore, the back rollers must be on different motors.
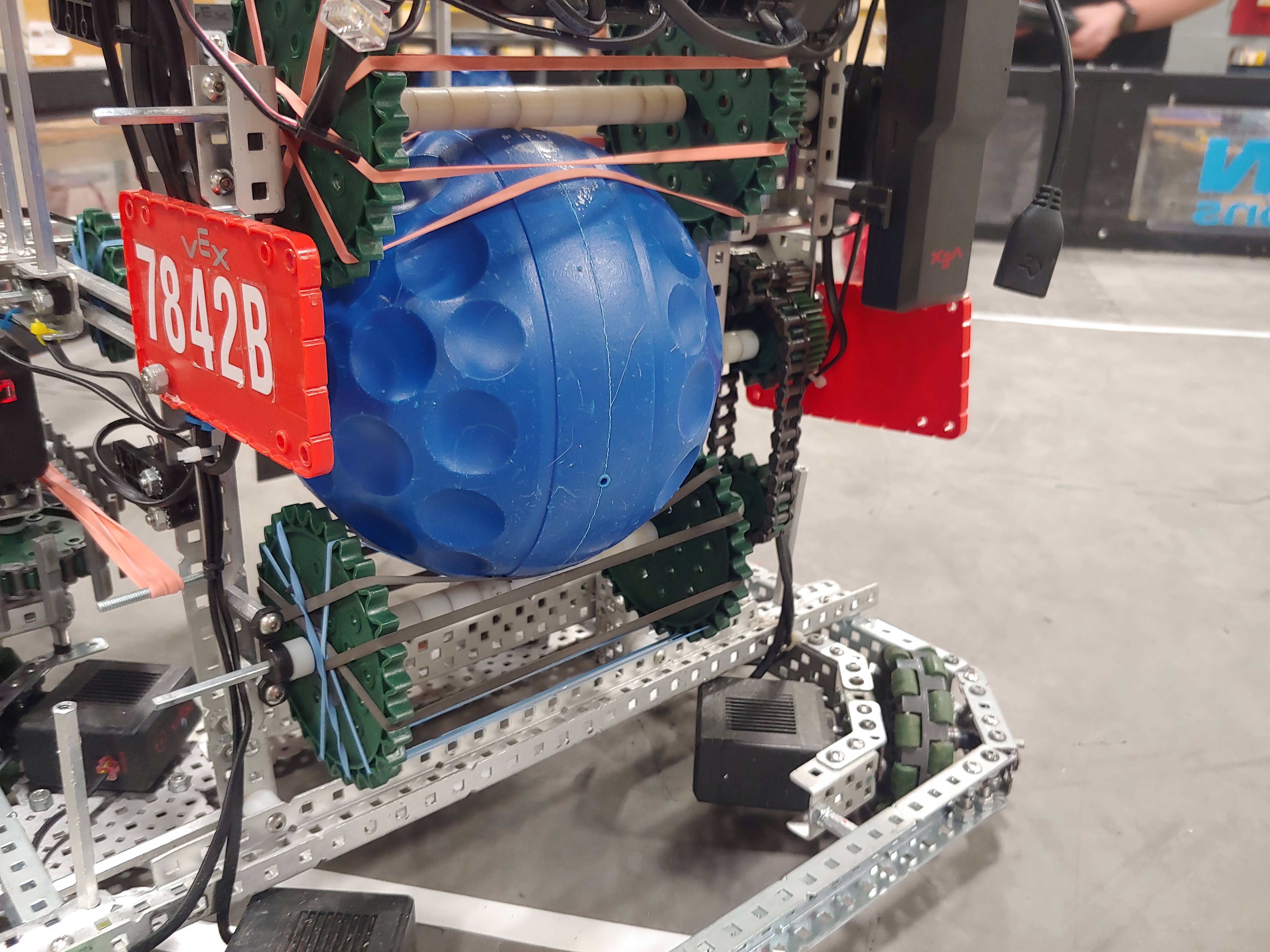
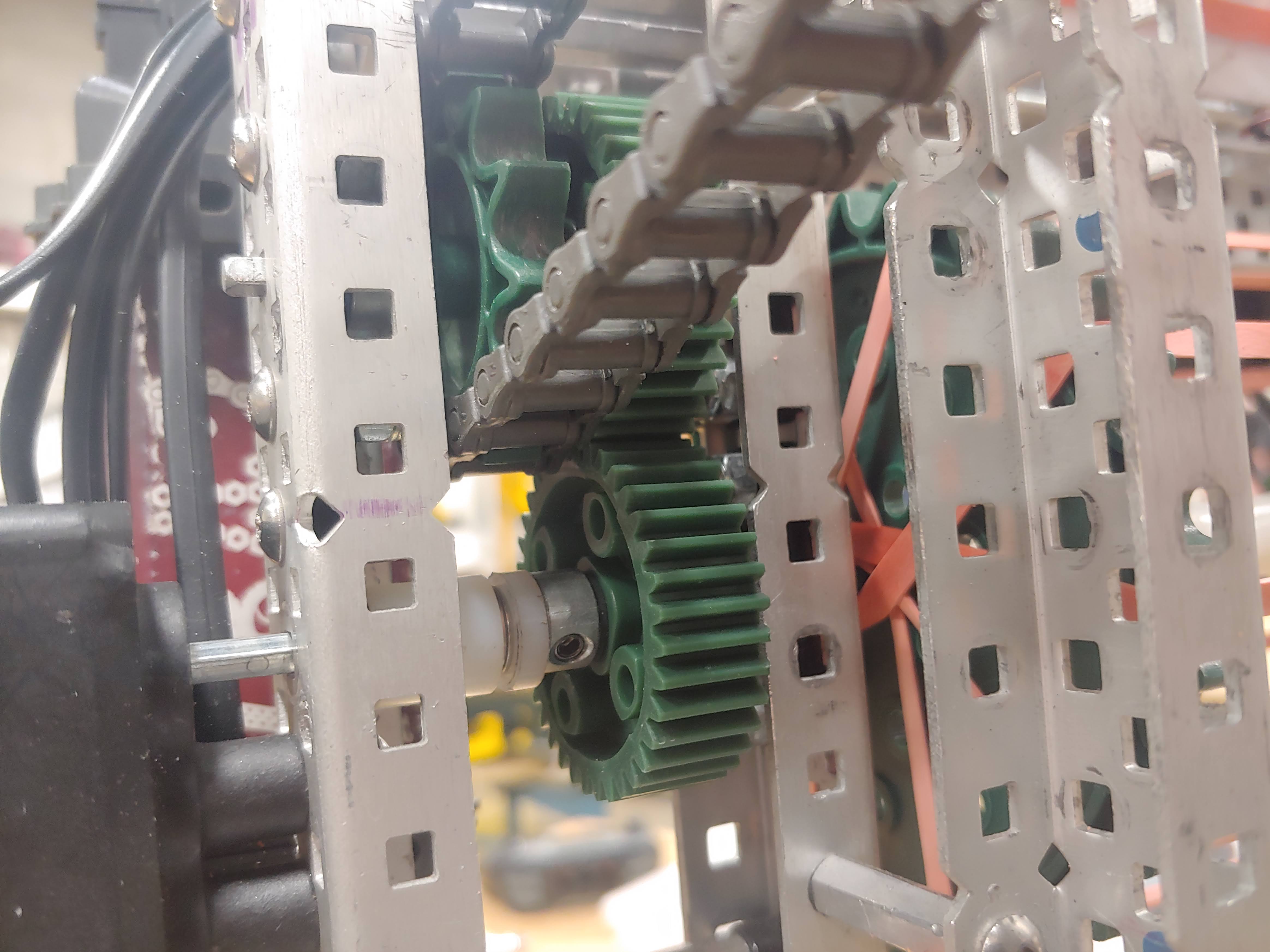
So, each one of the back rollers are connected to one of the front rollers but the front and back need to go opposite directions to move the ball up. To run two rollers opposite directions with one motor we made a gearbox to reverse the rotation.
The rollers that move the ball up or out the back run at 200 rpm and the one that shoots them runs at 600 rpm.
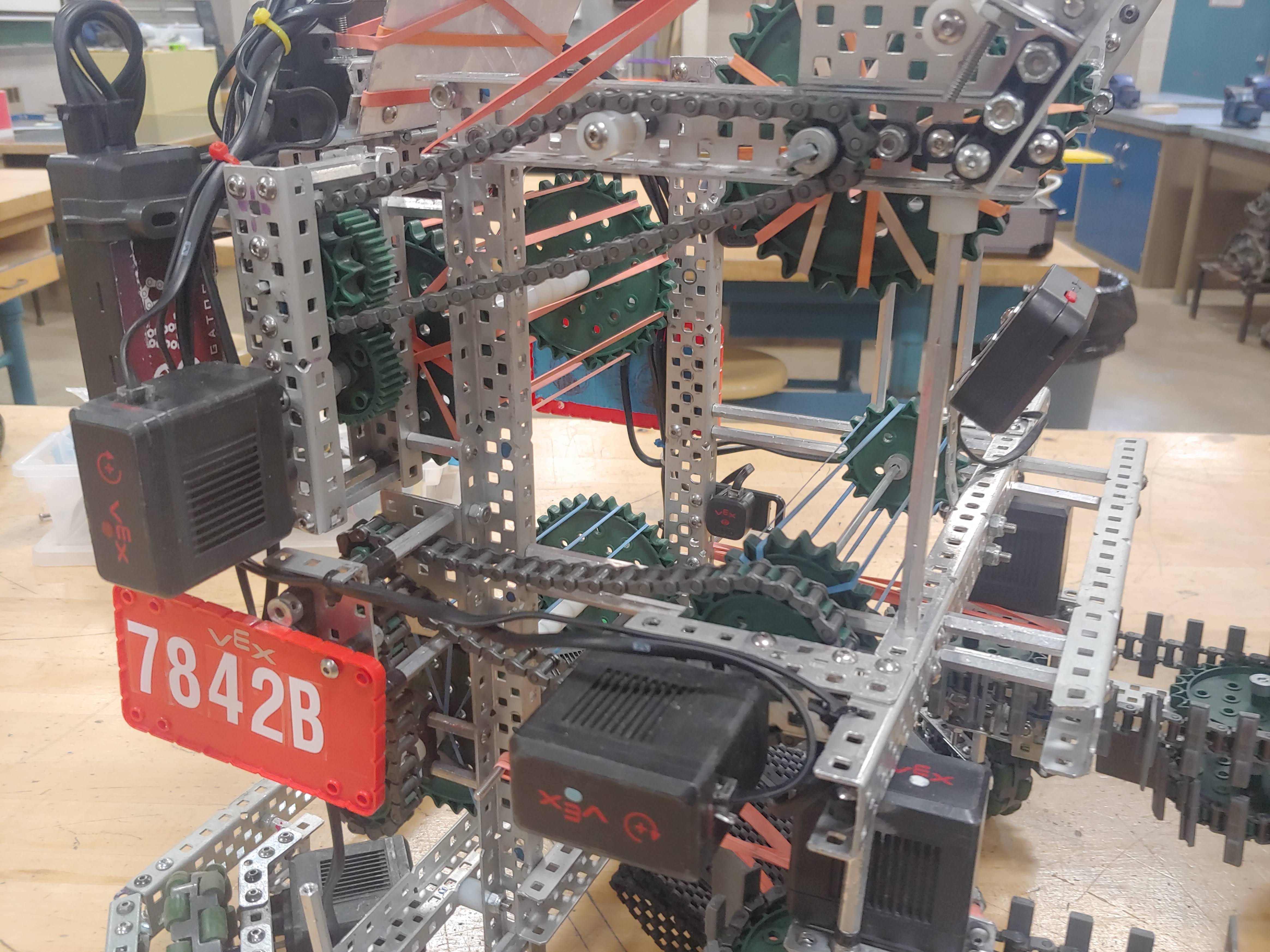
Lower reversing gearbox:
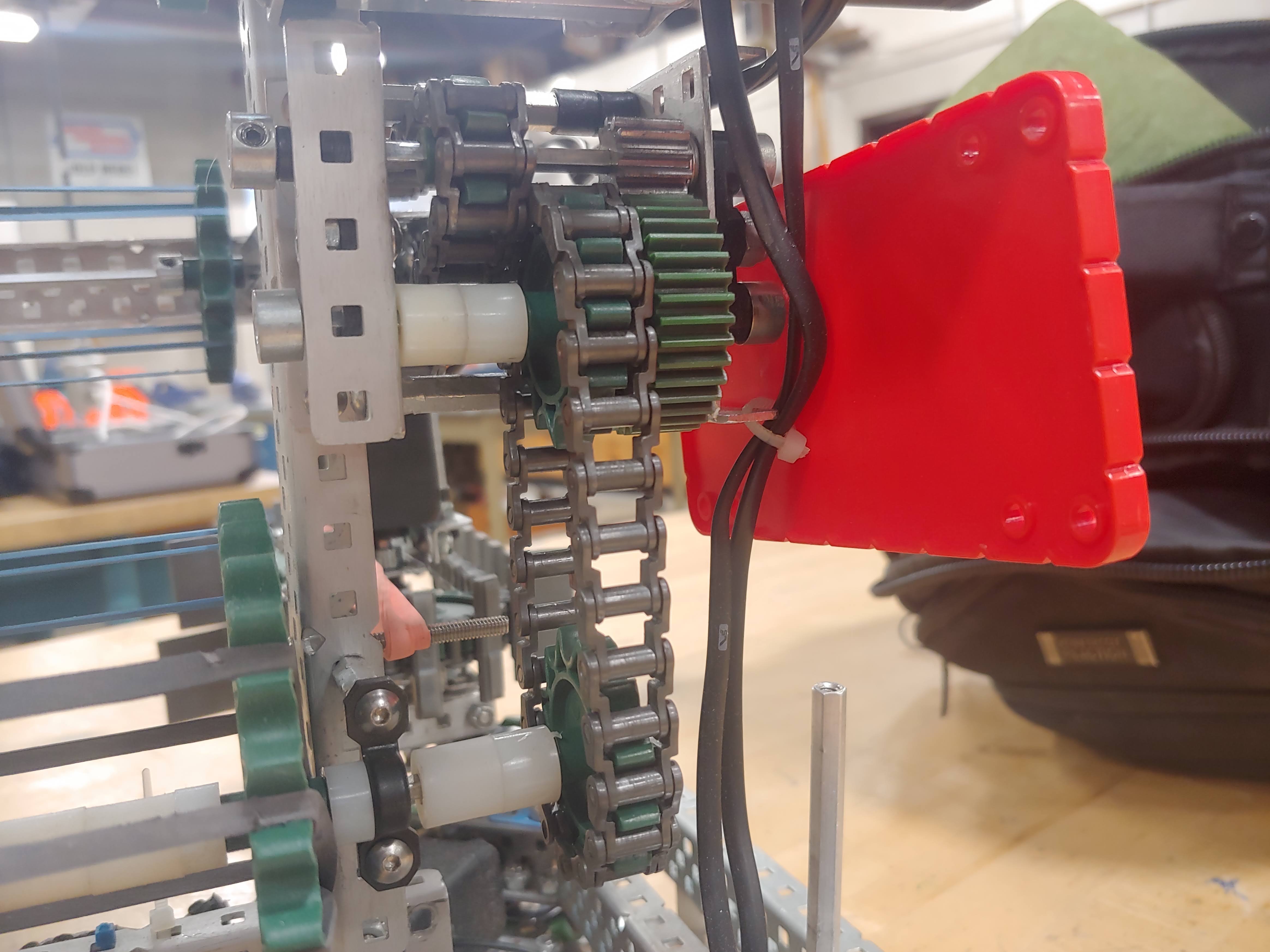
Upper reversing gearbox:
For shooting we made a 600 rpm roller with a hood made out of lexan and strapping for compression:
Intake sensors
We knew that we wanted the driver to be able to hold the “intake” button without being worried that the robot will expel balls. Therefore, we attached light sensors to the intake and hood which can detect the presence of a ball. This way, we can automatically turn off the rollers when they are holding a ball.