Robot Chassis - January 15, 2021
X-Drive
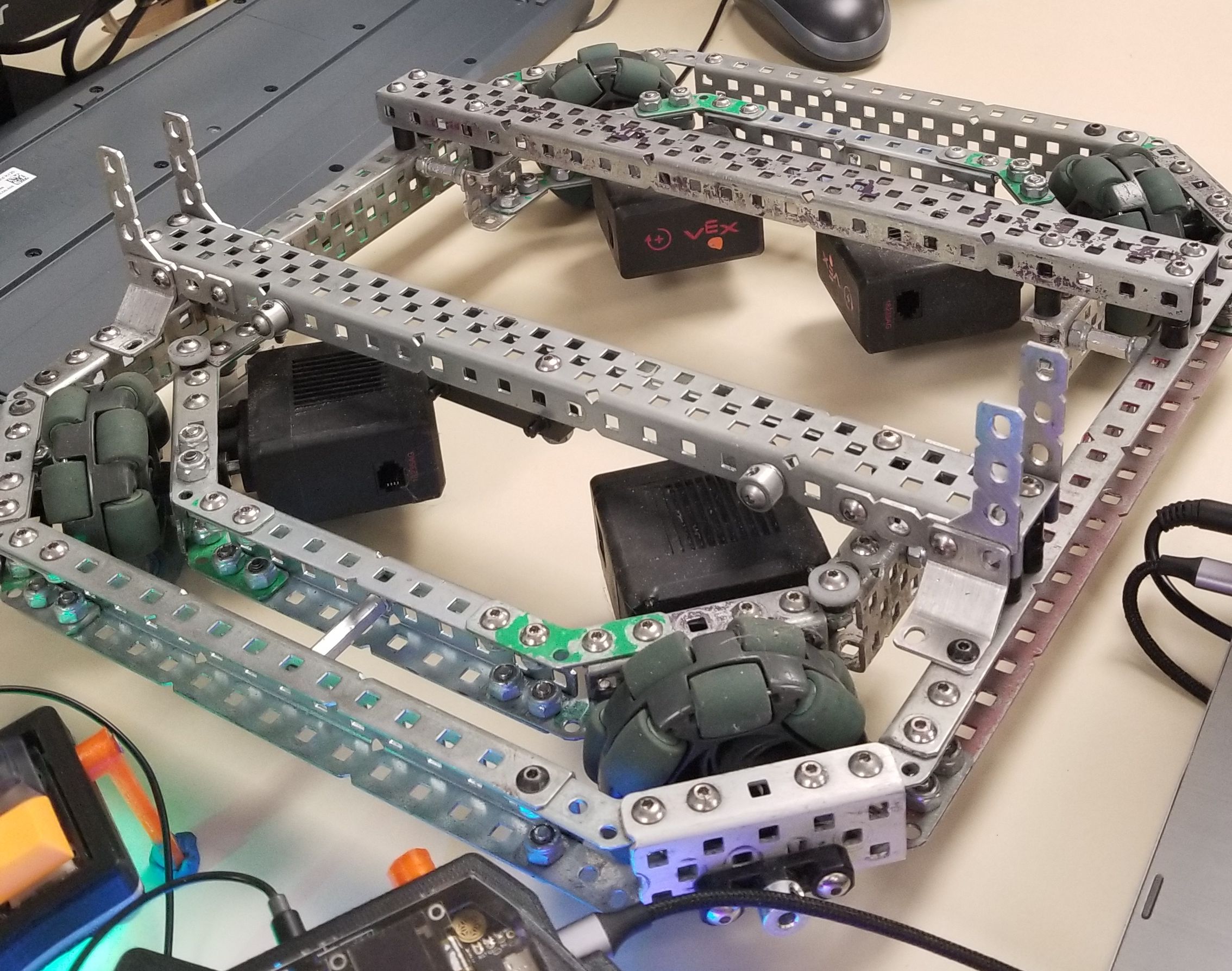
We decided to make an X-drive chassis with 2.75” wheels and direct-drive 200 rpm motors. We chose an X-drive because of its good manoeuvrability and consistency.
Because the drive is holonomic, it can drive and strafe in all directions. The low speed and high torque makes it very controllable during autonomous.